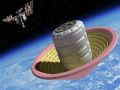
Создаваемый компанией OtherLab надувной робот AntRoach весит 35 кг при способности к переноске на спине до 450 кг. Его авторы намереваются не только побить эффективность робомула Управления перспективных исследований Министерства обороны США (DARPA), но и перевернуть всю робототехнику.
Мы однажды рассказывали о пневматических актуаторах для роботов: «руки» на пневматике отличаются малым весом, приличным быстродействием и способностью к длительному удерживанию тяжёлых предметов без дополнительных энергозатрат. Американская компания OtherLab пошла дальше, сделав целиком пневматического робота.
Основное его преимущество — малый вес при высокой прочности конструкции. AntRoach («Мура[вьед-тара]кан») способен нести 450 кг, в то время как робомул LS3 разработки DARPA может переносить лишь 180 кг, да и сам весит в районе двух центнеров (и около 140 кг без литиевых батарей). То есть он в несколько раз тяжелее, а его грузоподъёмность в 2,5 раза ниже. А это значит, что бóльшую часть энергии он тратит не на переноску груза, а на перемещение в пространстве самого себя. Именно поэтому его задача — пройти 32 км за 24 часа на одной зарядке — дело очень и очень непростое.
Надувной пятиметровый робот при переноске 450 кг будет тратить чуть-чуть больше энергии, чем LS3 на свои 180 кг. Кроме того, AntRoach может служить верховым животным, что для LS3 недоступно в силу ограниченных размеров.
Для передвижения AntRoach наращивает давление в своих мышцах до 4 атм, делая это относительно быстро, хотя и не настолько, как хотелось бы разработчикам. По их словам, при использовании сгораемых газов для наращивания давления скорость передвижения могла бы значительно вырасти (до уровня подушек безопасности). Пока, однако, прототип передвигается не быстрее 8 км/ч, что, впрочем, не меньше, чем у робомула.
Особенно оригинально решена извечная проблема автономно передвигающихся роботов: планирование безопасного маршрута, погубившее ещё советских лунных роботов. Чтобы узнать, нет ли на пути ям и прочих пропастей, AntRoach использует очень длинную шею, делающую его в профиль похожим скорее на бронтозавра, нежели на муравьеда или таракана. На ней закреплены датчики, информирующие тело о местности впереди и степени её проходимости, после чего и начинается движение.
Другая особенность новой машины — полностью пневматическая система актуаторов. Ноги робота представляют собой нечто среднее между присосками и копытами. При ходьбе он опирается на концы шести надувных баллонов-конечностей, которые на мягких и болотистых грунтах автоматически снижают давление, в результате чего площадь контакта увеличивается, и AntRoach не может завязнуть даже в болоте. Да-да, в прямом смысле: если он ступит на водную гладь, то не утонет, по крайней мере если не будет перегружен.
По сути, он даже плавать умеет, удерживая неподвижными передние и задние ноги, чтобы не создавать опасности переворачивания или потери груза, при этом активно гребя средней парой. Но даже если опрокидывание случится, компоновка ног/туловища такова, что робот самостоятельно перевернётся ногами вниз и спиной вверх.
Но и у пневматики есть (пока) недостатки: при использовании неармированного поливинилхлорида и равнопрочных ему материалов робот должен быть большим. Иначе жёсткость его «кожи» окажется недостаточной для удержания формы. То есть небольшие надувные роботы относительно сложны, потому что потребуют более прочных материалов для надувной оболочки.
Впрочем, как отмечает OtherLab, пока отрабатывается лишь концепт: настоящий шагающий робот для снабжения войск на поле боя определённо будет строиться на основе кевларовой ткани, превосходящей ныне используемый материал по удельной прочности в 12 раз. И тогда надувными смогут быть и очень небольшие роботы.
Источник: science.compulenta.ru