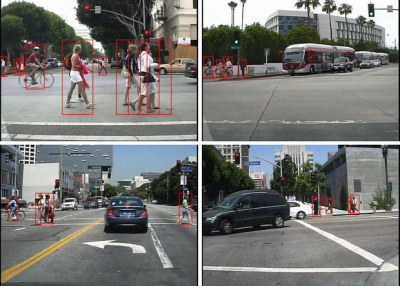
Исследователи из Калифорнийского университета в Сан-Диего разработали алгоритм распознавания пешеходов в режиме реального времени, который в качестве исходных данных использует только изображение с камеры. Доклад был представлен на конференции ICCV 2015, которая прошла в декабре в Сантьяго. С кратким описанием содержания работы можно ознакомиться на сайте университета.
Алгоритм сначала при помощи машинного зрения отсекает части изображения, где точно нет похожих на людей объектов. Фактически изображение человека сильно отличается в размерах в зависимости от расстояния, поэтому его сложно отделить от множества других вертикальных фигур по размерам. Программа запоминает участки, в которых есть контрастные вертикальные объекты, и передает такие фрагменты изображения на обработку обученной на распознавание людей нейросети.
За счет комбинирования методов машинного зрения и машинного обучения нейросеть занимается анализом только небольших фрагментов изображения, что, обеспечивает скорость обработки информации в два-четыре кадра в секунду. При этом, по словам авторов, их алгоритм допускает в два раза меньше ошибок, чем другие системы.
По словам разработчиков, использование нейросети для обработки изображений в режиме реального времени требует серьезных вычислительных мощностей, поэтому обычно в беспилотных автомобилях используются для этих целей данные не с камеры, а с радара, лидара и других датчиков. Применение подобного алгоритма в перспективе позволяет заменить набор дорогих сенсоров обычной камерой, кроме того, это значит, что алгоритм может использоваться и в обычных автомобилях, оснащенных камерой. Кроме того, подобная система может использоваться в системах видеонаблюдения и в роботах, работающих с людьми.
Николай Воронцов