Американские исследователи разработали нейроинтерфейс, позволяющий управлять отдельными пальцами биомеханического протеза. О своей работе они пишут в Journal of Neural Engineering.
Современные протезы, управляемые мозгом пациента, обеспечивают только синхронные движения пальцами, при которых кисть работает, как простой зажим (подобное движение человек совершает, например, когда берет теннисный мяч). Сотрудники Университета Джонса Хопкинса в Балтиморе, штат Мэриленд, пригласили для участия в эксперименте пациента с эпилепсией, которому для выявления очага судорожной активности было назначено электрокортикографическое картирование мозга (ЭКоГ, регистрация мозговой активности с помощью электродов, подведенных непосредственно к коре мозга).
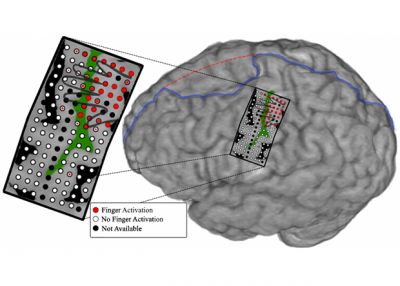
На участок коры мозга добровольца, отвечающий за движение кисти, наложили прямоугольную пластину со 128 электродами. Каждый из них регистрировал электрическую активность участка мозга диаметром около одного миллиметра. Затем пациенту предложили поочередно шевелить пальцами и записывали полученные сигналы. Электрическую активность коры при обработке тактильных ощущений зарегистрировали с помощью вибрационной перчатки, раздражающей кончики пальцев.
Полученные данные обработали с помощью специально разработанного алгоритма, и путем машинного обучения создали интерфейс упреждающего анализа сигналов мозга. Этот интерфейс позволил участнику исследования управлять пальцами модульного биомеханического протеза руки (Modular Prosthetic Limb) без предварительного обучения.
В начале эксперимента точность управления отдельными пальцами составила 76 процентов. Когда в алгоритме объединили безымянный палец и мизинец, которые в норме часто движутся совместно, этот показатель повысился до 88 процентов. Точность полного сгибания заданного пальца составила соответственно 64 и 77 процентов. После оптимизации выбора электродов максимальная точность управления отдельным пальцем достигла 96,5 процента. Движениям и тактильной обратной связи сопутствовала специфическая активация соответствующих участков коры мозга.
«Полученные результаты показали, что основанный на ЭКоГ нейроинтерфейс способен использовать природную анатомию сенсомоторной коры для управления отдельными пальцами в реальном времени без предварительных тренировок», — пишут авторы исследования. По словам одного из них, профессора неврологии Нэйтана Кроуна (Nathan Crone), для клинического применения технологию необходимо существенно доработать, и основанный на ней протез будет дорогостоящим.
Олег Лищук