Разработана технология создания недорогих искусственных мышц на основе жесткого каркаса, заключенного в мягкую камеру. Мышцы сокращаются за счет уменьшения в них давления, причем их можно создавать, используя разные материалы. Статья опубликована в журнале Proceedings of the National Academy of Sciences.
Инженеры, разрабатывающие роботов, нередко используют в своих изобретениях конструкции, напоминающие по функциям живых существ. Несмотря на это, для движения роботы все равно чаще всего используют электромоторы или двигатели внутреннего сгорания, соединенные со сложными механическими передачами. Некоторые исследователи придерживаются другого подхода и разрабатывают источники движения, более близкие по своему устройству к мышцам. Уже существует немало прототипов искусственных мышц, которые могут сокращаться подобно настоящим мышцам, но почти все они требуют дорогих материалов и технологических процессов, при этом эффективность многих из них все еще низка.
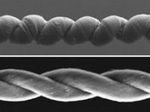
Исследователи под руководством Роберта Вуда (Robert Wood) из Гарвардского университета разработали простую и недорогую технологию создания эффективных искусственных мышц, которые можно создавать из большого количества разных материалов. Принципиальная схема создания таких актуаторов довольно проста. В качестве основы используется каркас заданной формы, который может складываться и раскладываться. Затем вокруг этого каркаса склеиваются или сплавляются два фрагмента пленки из полимера или другого воздухонепроницаемого и мягкого материала. Таким образом формируется мягкая камера с жестким каркасом внутри, которая подключается к источнику разницы давления.
Управление актуатором происходит за счет уменьшения или увеличения давления жидкости или газа внутри камеры. В результате актуатор начинает менять форму: складываться или наоборот увеличиваться в размерах, а в случае с каркасом сложной формы, совершать другие движения — например, изгибаться в определенную сторону.
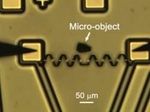
С помощью такой технологии исследователи создали несколько прототипов актуаторов, и измерили их эффективность. Один из этих прототипов, представляющий собой десятисантиметровый линейный актуатор весом менее трех грамм, смог поднять груз массой более трех килограмм. Исследователи подсчитали, что пиковая мощность таких актуаторов составляет около двух киловатт на килограмм массы, что делает их мощнее настоящих скелетных мышц млекопитающих.
Ранее ученые представляли множество прототипов искусственных мышц, работающих на основе разных принципов. Некоторые также работают за счет давления, например, робогусеница, основную часть которой занимает полимерная пена, покрытая силиконом, а также мягкие вакуумные актуаторы из множества полых ячеек. Другие используют для своей работы нагревание: таким образом работают мышцы на основе нейлоновой лески и недавно представленный материал, наполненный пузырьками с этанолом, который при нагревании превращается в газ и расширяется. Помимо этого недавно был представлен актуатор из множества слоев двумерного материала, который расширяется при внедрении в него сторонних ионов. Кстати, не всегда искусственные мышцы сделаны полностью из искусственных материалов. Тайваньские ученые сделали мышцы из тонкой пленки из кожицы лука, которая сокращается под действием электричества.